在机器人研发领域,硬件设计往往是从一块电路板的焊接开始,直至调试到让人「眼瞎」的精细过程。设计出性能卓越、稳定可靠的机器人硬件,不仅需要扎实的电子工程基础,更需要系统性的思维和对应用场景的深刻理解。
一、 基础筑基:从「焊板」开始
硬件设计的第一步是核心电路与元器件的实现。这包括:
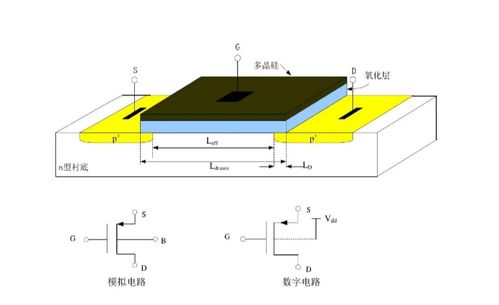
- 主控选型:根据机器人的计算需求(如实时控制、视觉处理、路径规划)选择合适的处理器(如MCU、SoC、FPGA)。
- 传感器融合:精心挑选并布局各类传感器(如IMU、激光雷达、摄像头、力觉传感器),设计其接口电路与供电,确保数据采集的准确性与同步性。
- 动力与驱动:为电机(伺服、步进、直流无刷等)设计高效的驱动电路(如H桥),并考虑功率分配、散热与保护机制。
- 可靠供电:设计多电压等级的电源树,确保纹波小、效率高,并在瞬态负载下保持稳定。
这个阶段如同搭建骨架,每一个焊点都关乎系统的底层稳定性。
二、 集成挑战:跨越「信号」到「系统」的鸿沟
当各个模块电路板就绪,真正的挑战在于系统集成:
- 信号完整性:高速数字信号(如摄像头数据、以太网)和模拟信号(如传感器微弱信号)需考虑走线、阻抗匹配、屏蔽,防止干扰与衰减。
- 电磁兼容:机器人内部电机驱动、开关电源都是强干扰源,必须通过滤波、接地、布局优化通过EMC测试,避免自扰和扰他。
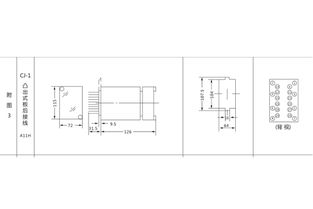
- 机械与热设计:硬件需要装入机械结构,需考虑PCB形状、接插件位置、散热路径(如利用壳体、添加导热垫或风扇)。
- 连接与布线:设计可靠的线束与连接方案,确保在运动、振动中接触良好,并便于组装维护。
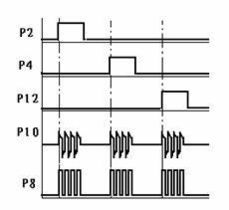
集成过程常常需要反复调试,工程师盯着示波器波形和逻辑分析仪数据,直至深夜,可谓「眼瞎」的初级阶段。
三、 设计升华:如何做到「牛X」?
超越基本功能,打造卓越硬件,需要注入更多前瞻性思考:
- 模块化与可扩展性:采用标准接口(如CAN FD、以太网、FPC),使计算、传感、驱动模块易于升级或替换,适应算法迭代和任务变化。
- 健壮性与容错:关键部件(如主控、电源)考虑冗余设计;电路加入过压、过流、ESD保护;软件硬件协同实现安全状态监测与恢复。
- 人机交互与调试友好:预留充足的调试接口(如SWD、UART)、状态指示灯,甚至设计配套的上位机配置工具,大幅降低开发与现场排查难度。
- 成本与量产优化:在性能与成本间取得平衡,选择合适商用等级元器件,设计易于自动化焊接和测试的PCB布局,为最终量产铺路。
四、 持续迭代:在「眼瞎」中追求完美
优秀的硬件设计绝非一蹴而就。它需要:
- 严格的测试:进行高低温、振动、长时间老化等可靠性测试,暴露潜在问题。
- 现场反馈闭环:收集实际应用中的数据(如故障率、性能瓶颈),驱动下一版本的改进。
- 软硬协同优化:与算法团队紧密合作,有时通过硬件加速(如专用ISP、AI芯片)来突破性能瓶颈。
这个过程,是无数次修改PCB、调试参数、分析故障的循环,是对工程师视力与毅力的终极考验,也是将创意转化为坚实物理存在的必由之路。
###
从焊接第一块电路板到打造出稳定强大的机器人硬件系统,是一条融合了电子工程、机械设计与系统思维的漫长道路。其中不乏令人「眼瞎」的繁琐调试,但正是对每一个细节的执着,对可靠性、扩展性和用户体验的不懈追求,最终定义了硬件设计的卓越与否。记住,伟大的机器人,始于一块精心设计的电路板,成于无数个深夜调试的坚持。